本次分享聚焦于高精地图在自动驾驶中的应用,主要分为以下两部分:
- 高精地图 High Definition Map
- 拓扑地图 Topological Map / Road Graph
- 3D栅格地图 3D Grid Map
- 定位 Localization
一. 高精地图 High Definition Map
★ 拓扑地图 Topological Map / Road Graph
1. 传统地图
我们先看下传统地图,这是从百度地图里截出来的图,从这张图我们可以看到很多信息:
- 拓扑信息:我们可以看到北清路的主干道,可以看到北清路可以延伸到哪些道路上去,这些拓扑信息从人的角度来看是能够识别出来的;
- 各类 POI:我们同时还能看到许多 POI 信息,包括中关村壹号-A1座,拉卡拉大厦等;
- 用户是人
- 米级精度:精度是米级别的,这对人来说足够了,因为人会自动判别周围的环境,做出自己的变化。
但是这些信息对于自动驾驶的车辆来说,到底是不是必要的、准确的或者足够的,那我们继续往下看。
2. 典型驾驶场景
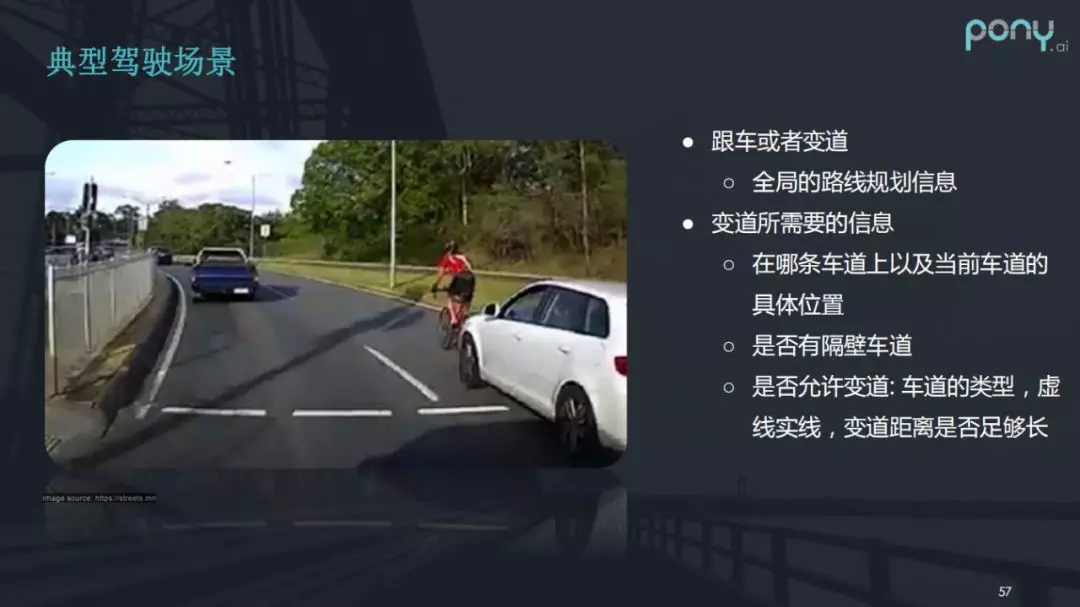
这是一个典型的驾驶场景,假设我们正在驾驶的车辆是后面的白车,可以看到他的前面有辆自行车,那么对于白车来说,他可以有俩个决策:跟车或者变道。那么对于自动驾驶车辆来说, 我们作出决策的前提第一个是要知道全局的路线规划信息,变道后是否还能够到达终点,此外还需要知道很多具体的信息: